
This page contains demos mostly generated by the book codes.
| Link | Description | Generated by |
|
Inverse Dicrete Fourier Transform step-by-step | dft1d_demo, chapter 3 |
|
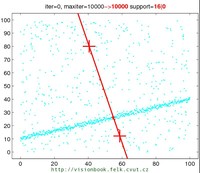
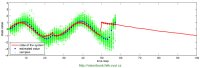
Ransac iterations in the problem of line fitting | ransac_demo, chapter 10 |
|
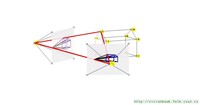
Animated 3D sketch of epipolar geometry. | u2Fdlt_demo, chapter 11 |
|
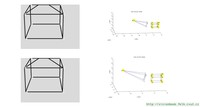
Motion away from the scene vs. zoom-out, note that only the motion changes the perspective | cameragen and showcams, chapter 11 |
|
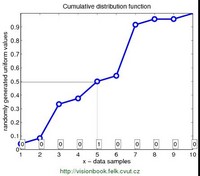
Importance sampling, 10 values are resampled to 100-values distribution according to their weights (importance). | importance_sampling_demo, chapter 16 |
|
Particle filtering, 1D signal | particle_filtering_demo, chapter 16 |